项目概述
项目名称
机器人关节减速器关键零件精密测量
项目介绍
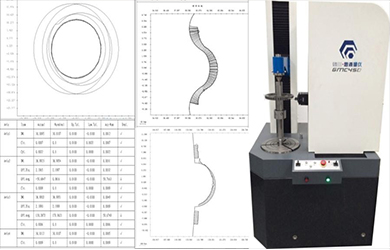
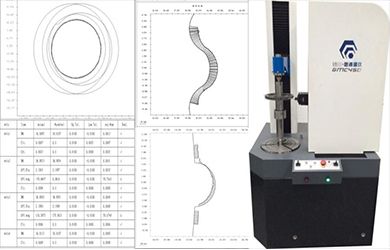
机器人关节减速器以 Rotate Vector(RV)减速器和谐波减速器最为常见。RV 传动减速器因为克服了传统针摆传动的缺点,且具有定位精度好、效率高、体积小、质量轻、传动比范围大、传动平稳、精度保持稳定、寿命长等优点,已成为未来机器人高端精密关节减速装置的发展趋势。
应用复杂型线型面测量中心配备三维光栅扫描测头对针齿壳、摆线齿轮、高精度偏心轴等复杂型线工件进行检测。这类工件测量参数除基本齿轮参数外,还有离散型线坐标点数据。在开始测量前将基本参数输入参数设置栏,并加载型线数据,测量软件将笛卡尔坐标系下型线数据点转化为圆柱坐标系的坐标点,根据基本参数设置测量初始半径,要求测头在该位置的变形矢量方向与理论型线法向一致,开始初始规划数据采集检测,随后进入自适应路径规划阶段,并要求全部测量过程测头受力及方向在小范围内变化,从而实现以上工件的全自动高精度检测。
项目详情

合作方式
协商合作
联系电话
4009962228 0755-22674851