项目概述
双目可聚焦系统及其应用
运动目标的视觉信息受不可预测和控制因素影响,具有巨大的不确定性,如运动目标本身的视觉变化、复杂运动场景和视觉遮挡等。我们的研究目标集中在建立一种新的运动视觉计算模型,包括视觉任务学习、前期注意选择、协同运动分析、鲁棒信息融合、上下文意识学习等,发展更有效的运动目标跟踪和识别方法和计算工具,以突破智能视频监控、机器人和人机交互等的应用瓶颈。
人类视觉具有根据任务和场景,把视觉注意集中于有意义场景目标的能力, 选择性和主动性是人类视觉信息处理的重要特征。机器人系统具有良好的运动能力,能够为机器人视觉系统实现外界信息获得的主动性和视觉信息处理的选择性提供有效的控制手段。通过算法编译赋予机器人视觉任务学习的场景感兴趣目标发现能力,通过多通道场景视频的视觉目标关联性计算,实现同一监控场景物体, 在不同摄像机获取的视频图像序列中,其目标图像的视点和尺度不同,基于目标动作和视觉外观的多线索感知特征整合的 target re-identification 可以解决大场景图像微小目标的协同跟踪问题。以 PTZ 相机为核心主动目标选择聚焦视觉系统的物理实现。PTZ 相机具有镜头变焦、变倍和全方位转动控制能力,它与固定摄像机的协同组合可解决远距离目标的清晰图像获取。因而,这种主动目标选择聚焦双摄像机系统具有 PTZ 相机和固定摄像机的各自优势,既保证对大场景的不间断监控,又可自动跟踪感兴趣目标。这种双摄像机系统可应用于视频监控, 在自然场景下跟踪进入主视场的行人或车辆,并获取其高分辨率图像数据,为目标识别和取证等提供高质量图像信息。
ATT 双摄像机三大模块:
1. 从图像样本学习视觉任务,在固定摄像机的监控场景图像主动发现兴趣目标;
2. 视场耦合模块保证监控场景的显著目标图像坐标与 PTZ 相机控制参数关联;Kalman 滤波时间对齐,PID 控制调控 PTZ 相机跟踪感兴趣目标物体。





ATT 双摄像机系统解决了大范围场景的固定摄像机监控视频由于目标物体距离摄像机过远,存在目标图像像素过少而导致视觉识别算法失效的问题。ATT 双摄像机系统借鉴人类视觉感知的选择性注意机制(包括显式注意与隐式注意机制),将固定摄像机与 PTZ 摄像机结合,从感知前端或信息源头有效提高感兴趣目标分辨率。同时,实现了海量视频数据的快速非相关内容过滤和大范围场景目标的主动发现与跨摄像机协同跟踪。
作为最具代表性的前端监控设备,监控摄像机的远距离控制、变倍、高清图像、预置位巡航、自动跟踪等功能在平安城市、交通、场馆、港口等项目/行业越来越发挥出重要的作用。随着安防等级的不断提升,再加上整个监控行业朝着数字化、网络化发展的进程,监控设备的智能化功能被更多地提上议事日程。而在此发展趋势下,自动跟踪成为了监控摄像机取得飞速发展的智能化技术之一。
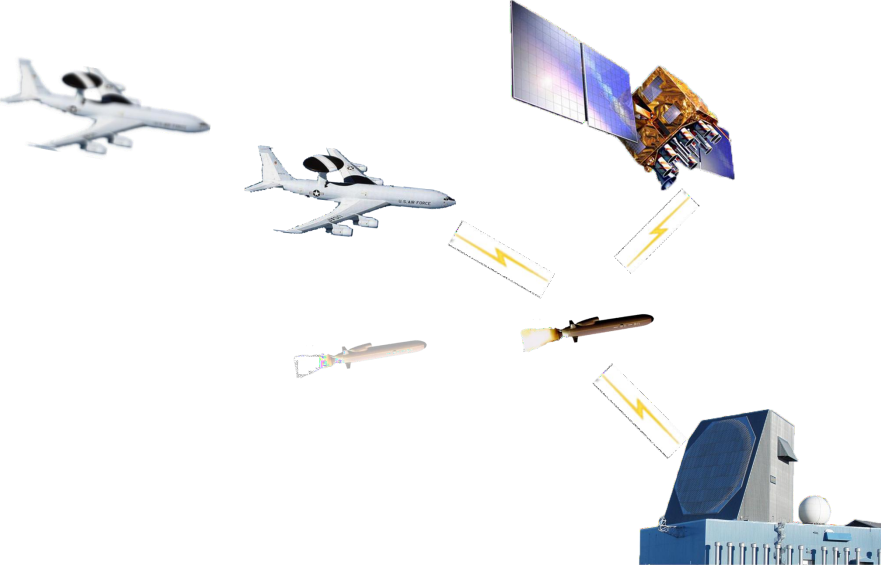
ATT 双摄像机可应用于监控场景的人员取证,解决大场景监控中目标面部区域的高清晰特写获取问题,使监控视频能作为有效证据,有利于协助取证破案。同时,解决多传感器协同对动态目标的指引跟踪问题,在航空航天以及军事领域中有重要应用。
在大场景环境中 ATT 双摄像机不仅通过双目,甚至多目执行全范围,多目标的监控、跟踪、抓取和报警等任务,并且通过有效融合多传感信息来精确导向追踪物体,使之能按照不同任务需求以不同方式接近目标。
协商合作
4009962228 0755-22674851